マイクロロボットを"流れ"作業で迅速に作製 -生体分子モーターによる人工筋肉で自在にプリント・動的再構成可能に-
岐阜大学・工学部の新田高洋教授は、大阪大学・大学院工学研究科の森島圭祐教授、王穎哲特任研究員(常勤)、北陸先端科学技術大学院大学・先端科学技術研究科の平塚祐一准教授との共同研究によって、マイクロ流路内 ※1で、マイクロロボット ※2の部品をプリント成形し、その場で組み立てることに成功しました。マイクロロボットの機械構造は光応答性ハイドロゲル ※3でつくられ、アクチュエータ ※4は同じチームが開発した生体分子モーターからなる人工筋肉を利用しました。このアクチュエータと機械部品をマイクロ流路内で組み立てることにより、マイクロロボット製造の柔軟性と効率が向上しました。この方法で、様々な機能のマイクロロボットが実現されました。また、この成果により、これまで困難であった、柔軟な構造を持つマイクロソフトロボットの実現や、マイクロロボットの量産化が期待されます。
本研究成果は、2022年8月24日午後2時(米国時間)発行の科学雑誌「Science Robotics」で表紙を飾りました。
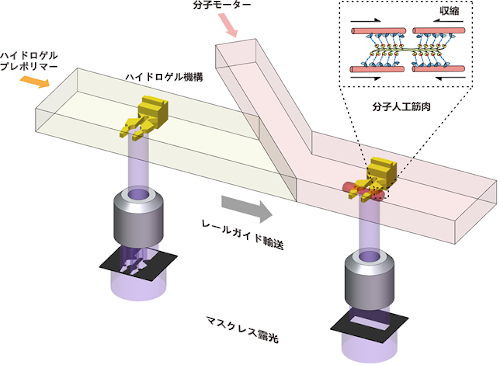 図1 マイクロロボットその場組み立て法
図1 マイクロロボットその場組み立て法 発表のポイント
- マイクロ流路の中で、光に応答する材料を流しながら、マイクロロボットのボディと駆動源となるアクチュエータを連続的に生産・組み立てを行う「マイクロロボットその場組み立て法」を開発
- 様々な機能をもつマイクロロボットの迅速な作製に成功
- より高機能なマイクロロボットの実現と、マイクロロボットの量産化に期待
詳しい研究内容について
 マイクロロボットを"流れ"作業で迅速に作製
マイクロロボットを"流れ"作業で迅速に作製
-生体分子モーターによる人工筋肉で自在にプリント・動的再構成可能に-
論文情報
- 雑誌名:Science Robotics
- 論文名:"In situ integrated microrobots driven by artificial muscles built from biomolecular motors"
- 著 者:Yingzhe Wang, Takahiro Nitta, Yuichi Hiratsuka ,and Keisuke Morishima
- DOI:https://www.science.org/doi/10.1126/scirobotics.aba8212
本研究は、日本学術振興会(JSPS)科研費 基盤研究(S)(課題番号22H04951)、基盤研究(A)(課題番号22H00196)、基盤研究(B)(課題番号19H02106)、学術変革領域研究(A)(課題番号21H05880)、挑戦的萌芽研究(課題番号21K18700)、新エネルギー・産業技術総合開発機構(NEDO)「次世代人工知能・ロボット中核技術開発」(JPNP15009)の支援を受けて行われました。
用語解説
- ※1 マイクロ流路:
ガラスや高分子材料で作製した数ミリメートルから数マイクロメートルの流路で、効率的に化学反応などを起こすことができる。微小なバイオセンサーや化学分析装置に利用されている。 - ※2 マイクロロボット:
数ミリメートル以下のサイズのロボットで、医療などへの応用が期待されている。 - ※3 光応答性ハイドロゲル:
紫外線などの光を照射することでゼリー状に固まる物質。 - ※4 アクチュエータ:
モーターやエンジンなどのように電気や化学エネルギーなどを利用して、動きや力を発生する装置。